Boletín Upiita
Control de movimiento en robots móviles de ruedas tipo diferencial
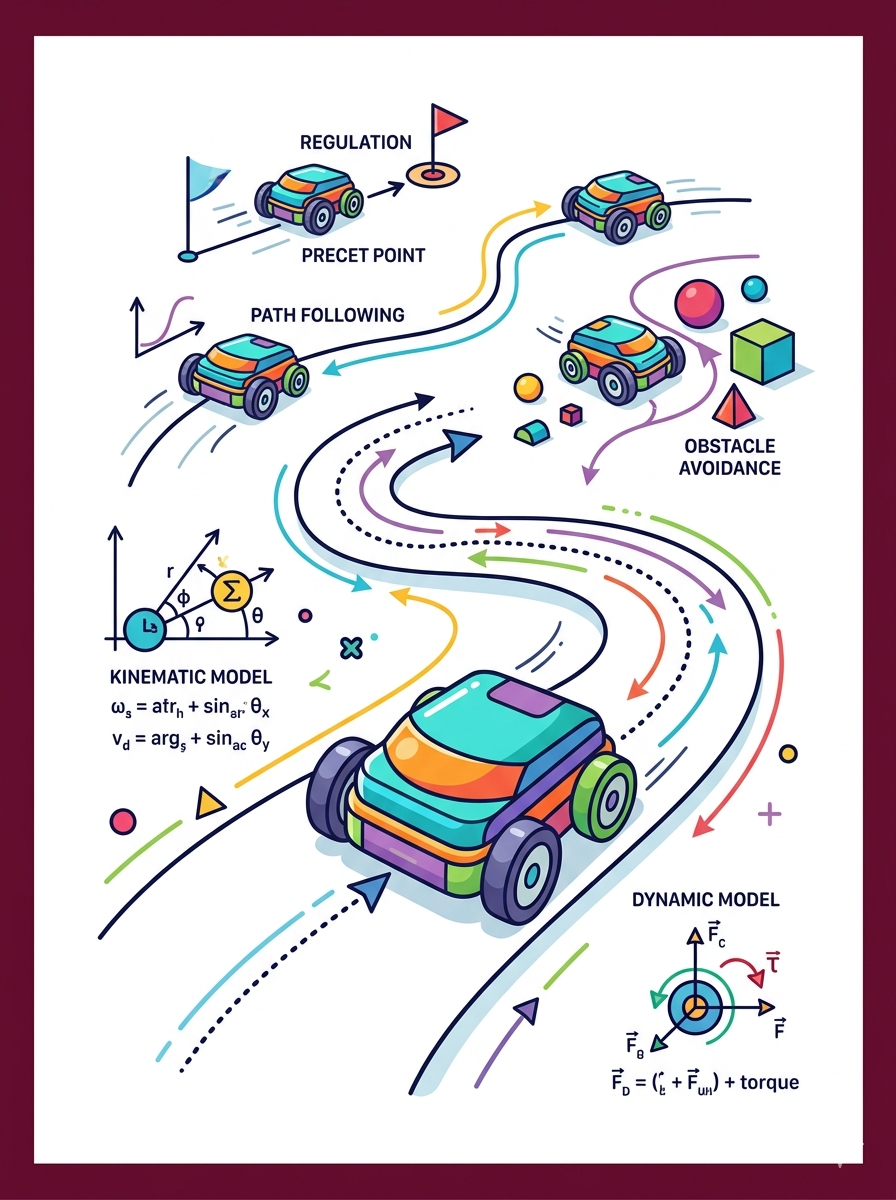
El artículo presenta un panorama general en el control de movimiento de robots móviles de ruedas (RMR) y muestra algunas de las áreas de control que se presentan en los RMR. Se discute el modelo cinemático y dinámico de los RMR tipodiferencial y se presentan algunas de las tareas de control más importantes en los RMR, como la regulación, seguimiento de sendas, seguimiento de trayectorias y evasión de obstáculos.
Palabras clave:
control de movimiento
robots móviles
ruedas tipodiferencial
Leer artículo
Disponible para lectura en línea y descarga