Boletín Upiita
Seguimiento de trayectoria mediante la solución del error lateral en un robot tipo diferencial
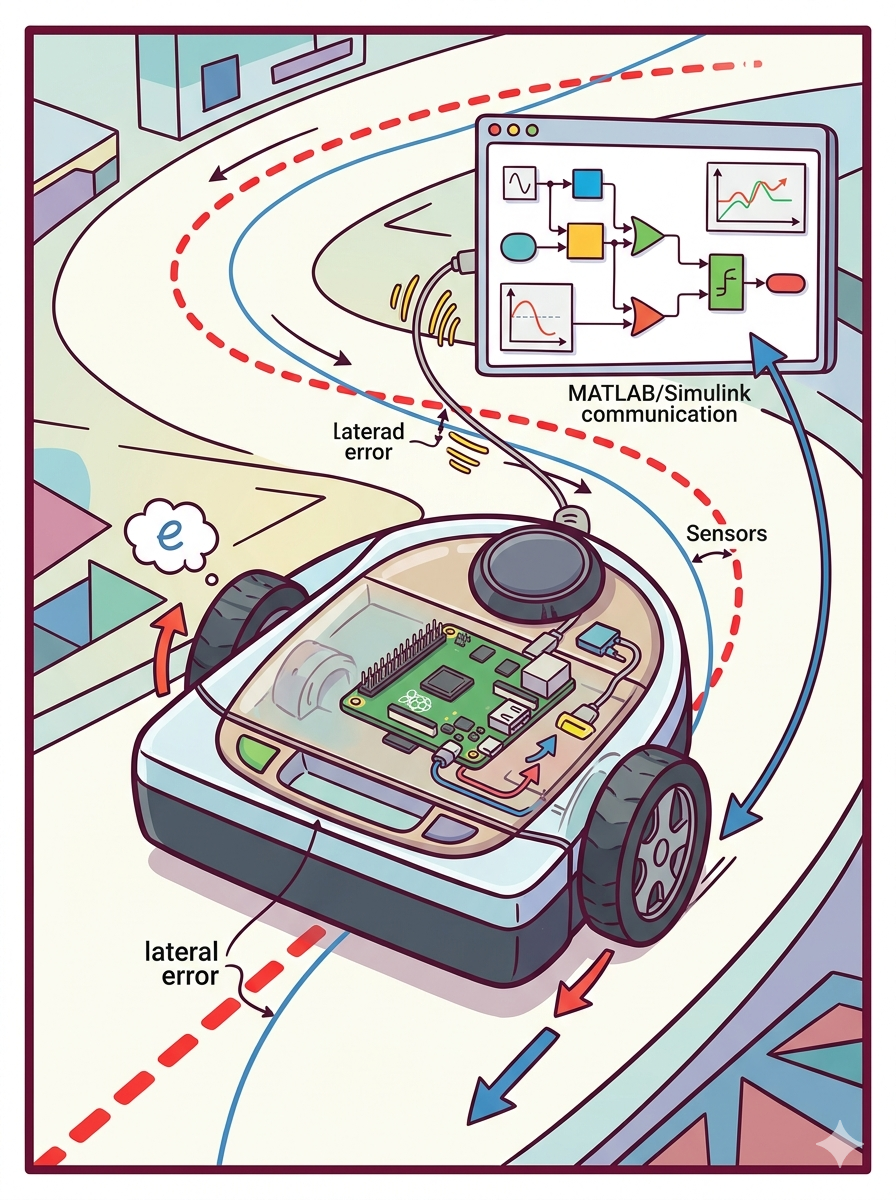
Se presenta un algoritmo de control basado en el error lateral para el seguimiento de trayectoria en un robot tipo diferencial. El control se implementa en un Neato y se comunica con Matlab/Simulink mediante una Raspberry.
Palabras clave:
control de robots
seguimiento de trayectoria
error lateral
Leer artículo
Disponible para lectura en línea y descarga