Boletín Upiita
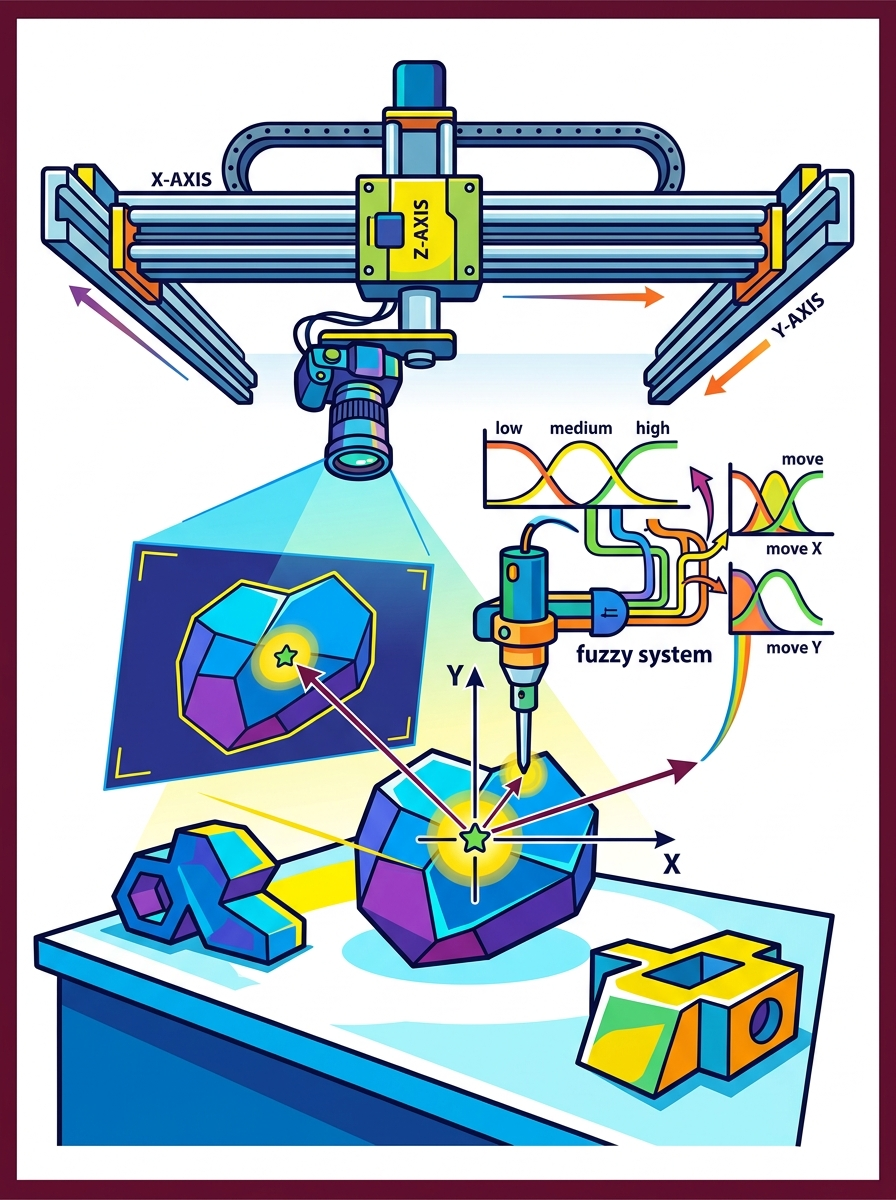
Localización y posicionamiento de un robot cartesiano en el centroide de un objeto
Un estudio sobre la localización y posiciónamiento de un robot cartesiano en el centroide de un objeto mediante visión artificial y un sistema difuso.
Palabras clave:
visión artificial
robot cartesiano
centroide
sistema difuso
Leer artículo
Disponible para lectura en línea y descarga